智能汽车,将开启物理世界通用人工智能时代。
在元戎启行CEO周光看来,随着智能驾驶汽车的量产上路,智能驾驶模型可以获得大型物理世界的脱敏数据,进而更好地理解物理世界的客观规律,最终进化成一套物理世界的通用人工智能,赋能千行百业。
元戎启行CEO 周光
元戎启行成立于2019年,彼时正值资本市场对自动驾驶行业的热情回落期。但元戎启行很早就意识到人工智能2.0时代的发展趋势,在竞争加剧、资本遇冷的行业背景下坚定投入,成为行业最早实践“端到端”技术路线的企业。
所谓“端到端”模型,是将感知、规划与控制三大模块整合在一起,消除了模块间的界限,简化了系统架构,无需程序员编写冗长的代码去制定规则,而是用海量数据去训练系统。
传统的模块化模型,好比“人传话”, 当传到第三、四个人之后,意思就容易出现偏差,而端到端则更像是人脑内直接传输处理的过程,能自主学习人类的驾驶方式,像老司机一样去处理复杂的驾驶场景。
早在几年前,元戎启行就在业内率先提出了多传感器融合的算法,将所有的感知放到一个大模型中。
2023年初,元戎启行正式开始布局端到端,8月便成功将端到端部署在车上,并进行了道路测试。
2024年,正式推出了基于端到端模型的高阶自驾平台 DeepRoute IO。元戎启行成为国内第一家能够将端到端模型成功上车的人工智能企业。
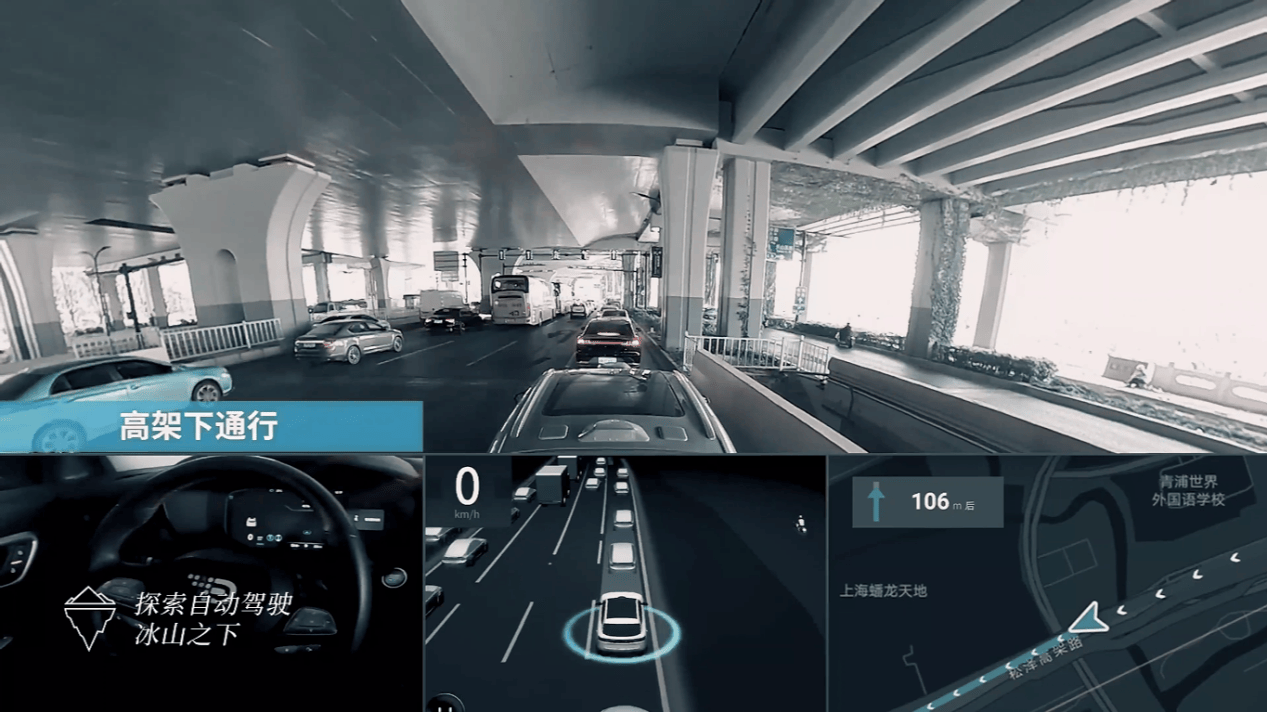
2024年初,元戎启行还联合腾讯推出了业内首个仅利用导航地图的“无图”量产高阶智驾方案。
所谓“无图”是指仅使用导航地图,摆脱了对高精地图的依赖。此前行业大多采用的是高精度地图,采集制作过程复杂,价格昂贵,难以大规模泛化,是制约自动驾驶量产的关键难题。

元戎启行认为,只有“端到端”才能真“无图”,而没有“无图”也就没有“端到端”,也只有“端到端”+“无图”才能更快实现全域覆盖落地,全国都能开。
即使是“无图”路线,地图的数据也是非常关键的。要实现真“无图”,对于图商的地图数据质量、全国覆盖率、以及地图的开放性都提出了很高的要求。
周光表示,腾讯地图是一个非常开放的平台,支持元戎启行根据自身的需求去运用腾讯地图离线 API 训练自己模型。“如果图商给到的只是一个实时的 API, 它不能去参与你的训练,其实对于你模型的提升是比较有限的。腾讯提供的离线 API,可以让我们在训练过程中去调用导航地图,让我们的这个训练出来的模型更加的先进,更加的智能。”
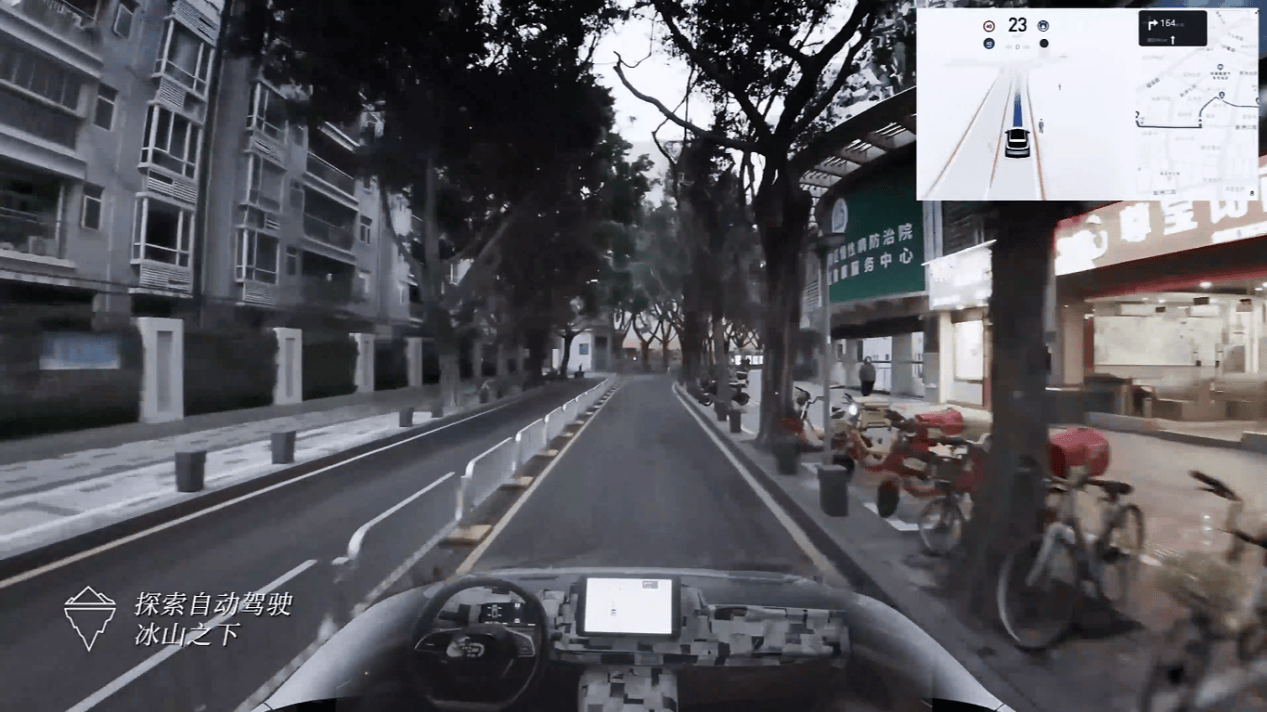
腾讯地图的全国覆盖、数据质量和开放性,保障了元戎启行只利用导航地图提供的道路方向、基本形状和拓扑信息,就可以实现点到点全域驾驶,像人一样驾驶。
“如果用冰山做比喻,我们今天更多看到的‘水面之上’是舒适、安全的体验。但我觉得在未来可能只有 5% 到 10% 的是水面之上的,绝大多数都在水下,包括数据集的采集、处理都是极其复杂的过程。我们也很庆幸我们在水下面有腾讯这样的优质的合作伙伴,携手去解决技术难题,让更多人可以在更多的地方体验到智能驾驶带来的便利。”目前,已有超万辆搭载元戎启行智能驾驶系统的量产车进入消费者市场。周光畅想,到了AI 3.0时代就是通用人工智能时代,AI技术将会成为一种基础设施,广泛应用到社会的各个层面。
 皖公网安备 34011102002444号
皖公网安备 34011102002444号